Il mio DCCdi Arturo Pasini |
| Esperienza di un fermodellista analogico che si converte a digitale. |
| La mia solita diffidenza verso il nuovo, in particolare verso ciò che non conosco, mi aveva
sempre portato a considerare con sospetto (anche perché costosi) i sistemi digitali per il
modellismo ferroviario. Immaginavo che fosse un'enorme complicazione volta poi in fin dei conti a gestire tutto il plastico in automatico e quindi sminuire l'intervento umano nella guida delle locomotive. Se uniamo a questo anche la punta d'orgoglio dovuta al fatto di manovrare il plastico con un sistema (dall'alimentazione alla regolazione della marcia, alla gestione dei sezionamenti e deviatoi con LED di conferma posizionamento su quadro sinottico) da me progettato e realizzato, mi mancava la spinta per tentare nuove strade. La spinta arriva dal numero di TTM (Tutto Treno Modellismo) di settembre 2004, c'è un articolo intitolato "DCC, leggende Fermetropolitane" mi incuriosisce, lo leggo, qualche punto fermo comincia a cedere: ma vuoi vedere davvero che...? Mi devo documentare, devo capire di più! Nell'articolo è citato www.dccworld.it, ottimo, internet è un grande strumento di informazioni. Il sito è ben fatto e soprattutto è rivolto a quanti si avvicinano dubbiosi, non il solito sito per addetti ai lavori, anzi... Poi c'è il forum, strumento ideale per sentire le esperienze (positive e anche negative) dalla voce diretta di chi le vive. Qualche giorno di lettura dalle varie sezioni del sito e di frequenza sul forum e finalmente le idee sono chiare. Decido di partire acquistando una centrale Lenz Compact, mentre per i decoder mi oriento su Zimo (la possibilità di acquisto in Italia e di manuali e consulenza in italiano per me compensano il costo). Ordino la Compact da Lokshop e un primo lotto di 5 decoder a Portigliatti (3 MX64 e 2 MX62 per le piccole loco da manovra). La trasformazione del plastico per il digitale è semplice: basta unire in parallelo le uscite dal sinottico delle varie tratte sezionate, isolandole dalla vecchia alimentazione continua, e collegarle alla Compact. Lascio sezionata la sola tratta compresa nel cappio di ritorno, che decido di continuare a gestire manualmente, senza l'apposito modulo, in quanto essendo nascosta mi consente la fermata del treno e l'inversione del deviatore di alimentazione. Comincia quindi la digitalizzazione delle locomotive. 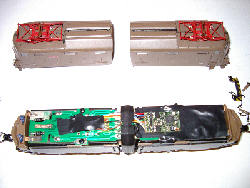 Per il battesimo scelgo il pezzo più facile: E636 Roco dotata di presa NEM,
lavoretto semplicissimo, per motivi di spazio scelgo di piazzare il decoder
nella semicassa opposta alla presa NEM e far passare i fili sotto il finto mantice.
Per il battesimo scelgo il pezzo più facile: E636 Roco dotata di presa NEM,
lavoretto semplicissimo, per motivi di spazio scelgo di piazzare il decoder
nella semicassa opposta alla presa NEM e far passare i fili sotto il finto mantice.
Nessun problema, la loco si muove subito bene e sul plastico si comporta a perfezione, minimi interventi di programmazione per indirizzo, velocità massima, decelerazione, accelerazione e viene subito messa al lavoro. Seguono due macchine di concezione un po' antiquata: D445 Lima con motore G e D341 RR scala 1:80 con motore ad asse verticale (il famoso cipollone). Queste macchine non hanno problemi di spazio e sono state già dotate in passato di prese di corrente aggiuntive su tutte le ruote, tuttavia richiedono interventi di programmazione per ottimizzare il funzionamento alle basse velocità dei loro vecchi motori. Alla fine, vista anche la loro scarsa trazione (facilità di slittamenti) decido di accantonarle momentaneamente e smonto i decoder a vantaggio di altre macchine.  Tocca allora alla D341 1a serie cardanica Lima, Questa macchina ha una presa NEM
che non mi convince: in pratica sono 8 fori sul circuito stampato, vi saldo allora una presa NEM costruita con uno zoccolo da
integrato, vista su DCCWorld, ma l'altezza non mi consente di infilare la relativa
spinetta, sono costretto allora alla saldatura dei fili sulla presa. Forse in seguito
opterò per la rimozione del circuito come per le loco successive. Come per la E636,
un abbondante strato di nastro isolante ricopre il circuito stampato per evitare
contatti indesiderati. Anche qui la programmazione si limita ad indirizzo, velocità,
accelerazione, decelerazione. Nessun problema.
Tocca allora alla D341 1a serie cardanica Lima, Questa macchina ha una presa NEM
che non mi convince: in pratica sono 8 fori sul circuito stampato, vi saldo allora una presa NEM costruita con uno zoccolo da
integrato, vista su DCCWorld, ma l'altezza non mi consente di infilare la relativa
spinetta, sono costretto allora alla saldatura dei fili sulla presa. Forse in seguito
opterò per la rimozione del circuito come per le loco successive. Come per la E636,
un abbondante strato di nastro isolante ricopre il circuito stampato per evitare
contatti indesiderati. Anche qui la programmazione si limita ad indirizzo, velocità,
accelerazione, decelerazione. Nessun problema.
Installati i primi decoder (5) ho quindi cominciato ad assaporare il piacere della guida, soprattutto la libertà di effettuare manovre verosimili, senza essere costretto ogni volta a portare le loco sulle varie tratte sezionate. A questo punto mi restano solo quattro locomotive da digitalizzare, per cui ordino subito i relativo Zimo MX64.  Roco E626 non NEM. Anche qui opto per la rimozione del circuito stampato esistente (ne taglio e
riutilizzo solo la parte con le lamelle cha danno corrente al motore). Questa loco era
già stata modificata con l'eliminazione delle lampade e dei diodi a placchetta e
l'installazione di lampade con fili. Il decoder viene facilmente sistemato in un
vano del telaio, preventivamente foderato di nastro isolante. Rituale programmazione
indirizzo, ecc...
Roco E626 non NEM. Anche qui opto per la rimozione del circuito stampato esistente (ne taglio e
riutilizzo solo la parte con le lamelle cha danno corrente al motore). Questa loco era
già stata modificata con l'eliminazione delle lampade e dei diodi a placchetta e
l'installazione di lampade con fili. Il decoder viene facilmente sistemato in un
vano del telaio, preventivamente foderato di nastro isolante. Rituale programmazione
indirizzo, ecc... |
 Lima Aln668 cardanica (in lavorazione).
A prima vista quest'automotrice sembrerebbe non avere problemi di spazio, tuttavia,
non volendo lasciare il decoder nella parte arredata del vano passeggeri, sto
sperimentando una sistemazione curiosa: l'ho fissato con del biadesivo spugnoso sul
motore. A causa di un precedente lavoro (tornitura e gommatura delle quattro ruote
del carrello motore) questa macchina sta dando problemi di captazione della corrente,
con conseguente marcia a singhiozzo. Sto quindi realizzando un collegamento tramite
quattro fili (si intravedono nella foto) con la rimorchiata per ottenere la presa di
corrente anche dai suoi carrelli e dotarla di luci bianche/rosse sulla testata non
accoppiata.
Lima Aln668 cardanica (in lavorazione).
A prima vista quest'automotrice sembrerebbe non avere problemi di spazio, tuttavia,
non volendo lasciare il decoder nella parte arredata del vano passeggeri, sto
sperimentando una sistemazione curiosa: l'ho fissato con del biadesivo spugnoso sul
motore. A causa di un precedente lavoro (tornitura e gommatura delle quattro ruote
del carrello motore) questa macchina sta dando problemi di captazione della corrente,
con conseguente marcia a singhiozzo. Sto quindi realizzando un collegamento tramite
quattro fili (si intravedono nella foto) con la rimorchiata per ottenere la presa di
corrente anche dai suoi carrelli e dotarla di luci bianche/rosse sulla testata non
accoppiata.
Prossimi lavori: migliorare la trazione delle due diesel anziane (D445 e D341) per poterle digitalizzare ed aggiungere eventualmente un controllo remoto (LH30 o altro). |
Dai un voto a questa pagina:
(Unobtrusive) AJAX Star Rating Bar Homepage
(Unobtrusive) AJAX Star Rating Bar Homepage
Informazioni
HomeIniziare con il DCC
FAQ
Eventi
News
Recensioni
Centrali DigitaliDecoder
Accessori Digitali
Software
Impianti Digitali
Guide
Digitalizziamo le LocoDatabase Rotabili
Programmazione CV
Progetti Digitali
Intellibox Bus - Loconet
Il mio sistema digitale
Cablaggi
Documenti Utili
Informazioni TecnicheGlossario Digitale
Manuali Prodotti
Video
Risorse
ContattiForum
Chat
Links
Lo Staff di DCCWorld
RSS